


DR210-2.65 6-Axis Articulated Robotic Arm
The DR210-2.65 6-axis articulated robotic arm is designed for industrial applications. It is a versatile and highly precise robotic arm that can perform a wide range of complex tasks in various industries such as manufacturing, assembly, and material handling.The DR210-2.65 robotic arm is built with advanced technology and features six axes of motion, allowing it to move with a high degree of freedom and flexibility. Each axis is equipped with a powerful servo motor, which enables precise and smooth movements. The arm is capable of reaching a significant range of positions and orientations, making it suitable for tasks that require complex motions and precise positioning.One of the key advantages of the DR210-2.65 6-axis articulated robotic arm is its payload capacity. It is designed to handle heavy loads with ease, allowing it to lift and manipulate objects of substantial weight. This feature makes it ideal for applications that involve moving large parts or components, such as in the automotive or aerospace industries.The robotic arm is controlled by a sophisticated software system that provides intuitive programming and operation. It supports various programming languages and interfaces, enabling easy integration with existing manufacturing systems. The software allows users to teach the robot specific tasks by manually guiding its movements or by programming complex sequences of actions.Safety is a critical aspect of industrial robotics, and the DR210-2.65 6-axis articulated robotic arm is equipped with multiple safety features to ensure a secure working environment. It has built-in collision detection sensors that can detect obstacles or unexpected movements, enabling the arm to stop or change its path to avoid accidents. Additionally, it can be programmed with safety zones and limits to prevent it from reaching restricted areas or exceeding specified ranges of motion.| Models | DR210-2.65 | |
| Arm form | Vertical multi-joint (6-axis) | |
| Maximum loads | 210KG | |
| Maximum stroke | J1 | ±185° |
| J2 | -65°~+85° | |
| J3 | -226°~+84° | |
| J4 | ±360° | |
| J5 | ±120° | |
| J6 | ±360° | |
| Maximum speed | J1 | 120°/s |
| J2 | 110°/s | |
| J3 | 115°/s | |
| J4 | 190°/s | |
| J5 | 150°/s | |
| J6 | 220°/s | |
| Allowable torque | J4 | 1200N.M |
| J5 | 1200N.M | |
| J6 | 650N.M | |
| Repeat Positioning Accuracy | ±0.08 | |
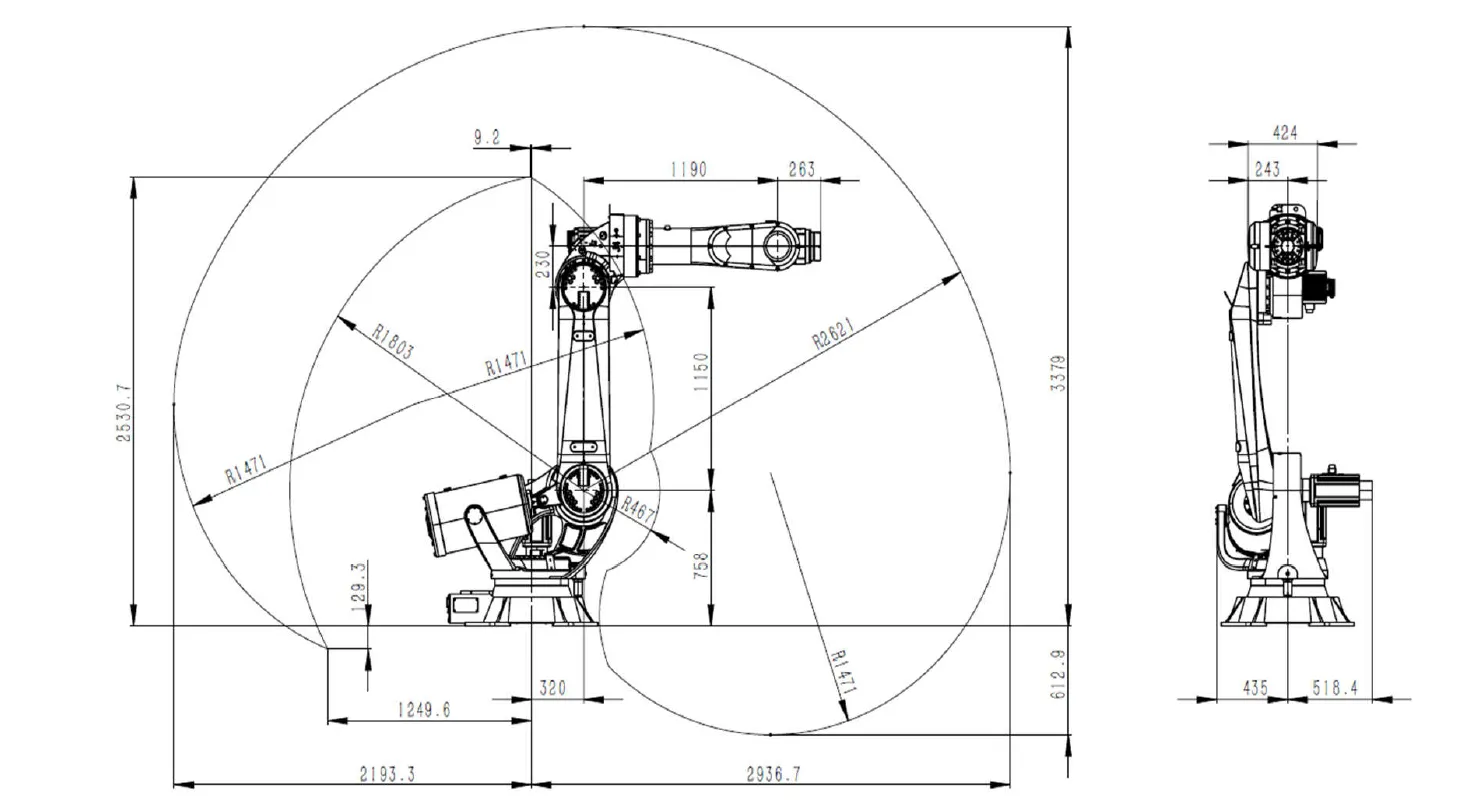
| Maximum coverage area | 2936.7 | |
| Body weight | 1280KG | |
| Installation Methods | Floor | |
| Installation Environment | Environmental temperature | 0-45℃ |
| Relative humidity | 20-80% (no condensation) | |
| vibratory | Below 0.5G | |
| other | The robot must be installed away from flammable or corrosive liquids or gases and Electrical interference sources. | |
| IP rating | Wrist IP67, rest IP54 | |
| Characteristic | Compact, high speed, high accuracy, high expandability, easy to operate | |
| Application scenario | Cutting, assembly, handling, marking, grinding | |
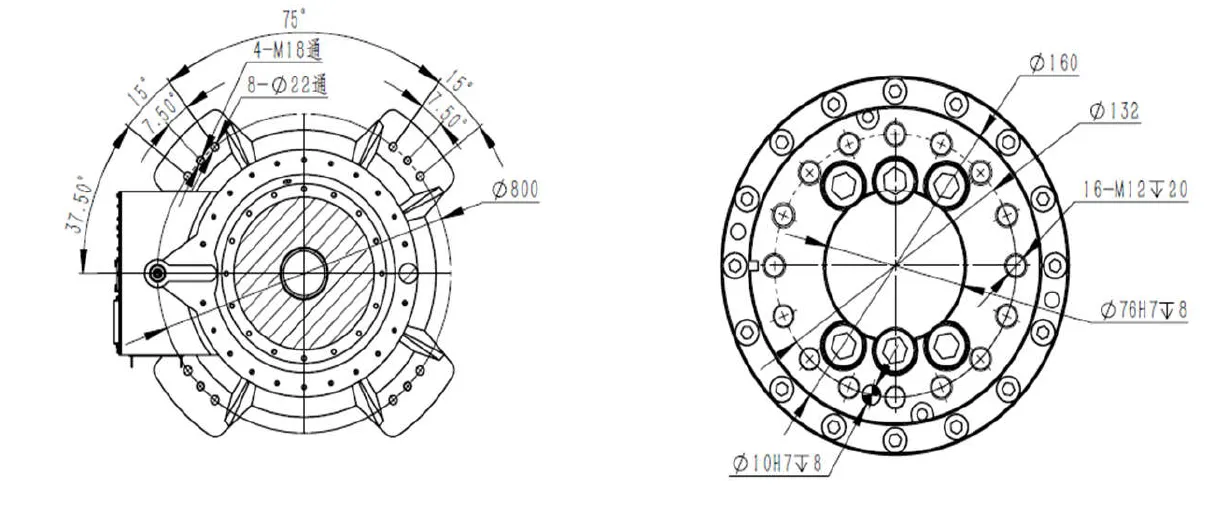

 |  |
 |  |
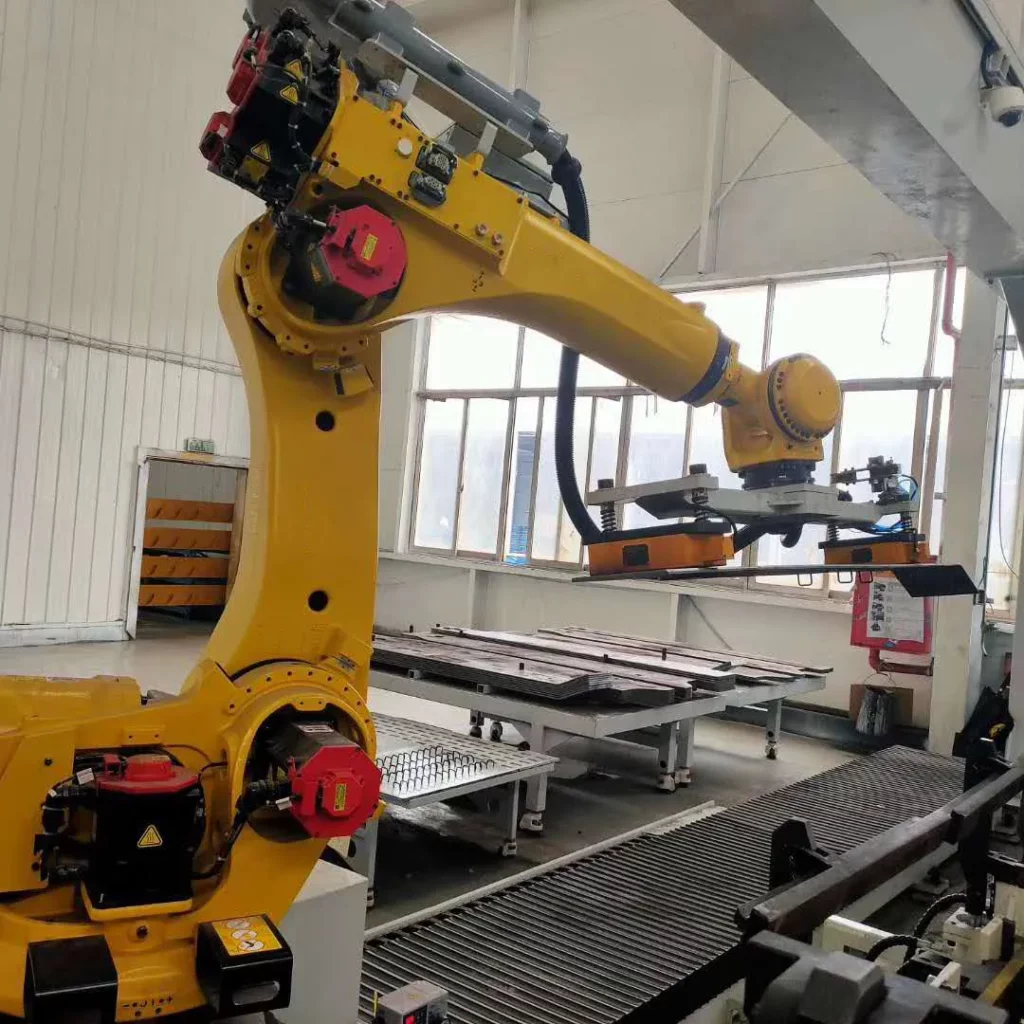
 |  |
Address
Luotuo Industrial Area, Zhenhai District, Ningbo City, China
Tel











 Raydafon
Raydafon